







协作机器人和关节模组 >
协作机器人旨在像人类同事一样进行学习和适应,这就需要受控的安全运动控制。 借助科尔摩根伺服电机,协作机器人和力限制机器人为包装、工厂自动化、食品和饮料加工、生命科学、医疗自动化等行业带来了新的能力和效率。
外科手术自动化 >
基于科尔摩根电机和控制设备的机器人系统能够帮助外科医生以更高的成功率完成专业的微创手术,包括改善视力和挽救生命。
适用于人形机器人的电机 >
适用于人形机器人的电机:利用专为机器人设计的运动控制系统,解决性能、尺寸、重量、功耗和成本等问题。
外骨骼 >
无论是为老年人提供更强的行动自由和行动能力,还是在工业应用中提升人体机能,在这些前景的鼓舞下,人们对于外骨骼的需求正在显著上升。但如何有效、安全地模仿人类运动,是一项不折不扣的挑战。设计人员必须平衡转矩和速度的需求,同时还要保持设计紧凑、轻便、舒适,并且能够在达到性能峰值时维持低温。这正是战略性的电机设计和选择大显身手之处。
户外机器人 >
适用于户外、地下和水下机器人的先进运动控制系统 - 科尔摩根探索其优化的运动控制系统如何提高精度和效率,使移动机器人能运行更持久
工业多关节机器人 >
建造更轻、更小的工业机器人,并达到更高的速度和精度。我们可以为多种尺寸和方案的产品提供更高的功率密度。
SCARA机器人 >
从二十世纪八十年代早期开始,选择顺应性装配机器手臂(SCARA)技术就给工厂自动化、部件组装、生命科学以及其它应用领域的拾放过程带来了根本性的变化。外骨骼规模化:加速从研发到全速生产的过渡
外骨骼市场仍处于早期阶段 — 但它发展迅速,充满机遇。
这对于原始设备制造商来说是一把双刃剑,厂商必须找出最具影响力的应用,并攻克全速生产的难题。
了解更多相关信息
外骨骼规模化:加速从研发到全速生产的过渡 >
外骨骼市场仍处于早期阶段 — 但它发展迅速,充满机遇。 这对于原始设备制造商来说是一把双刃剑,厂商必须找出最具影响力的应用,并攻克全速生产的难题。
推进外骨骼技术发展:运动控制和电机设计的关键考虑因素 >
提到外骨骼应用时,运动控制设计和电机选择是设计过程中的成败关键。 和我们一起探索关键的考虑因素和见解,迈向成功之路。
更舒适、行动更安全的外骨骼设计 >
随着外骨骼市场的不断发展,原始设备制造商如何才能实现更舒适、灵活、可靠的设计? 请阅读博客以了解更多信息。
加快新一代假肢和外骨骼的开发 >
Humotech 创立于 2015 年,它的诞生源自一个简单的问题:不同于传统的 原型机设计与制造流程,如果工程师可以通过编程让机器人在用户行走时实 时模拟假肢、矫形器、外骨骼和其他可穿戴机器装置,从而对它们进行评 估,那会怎么样?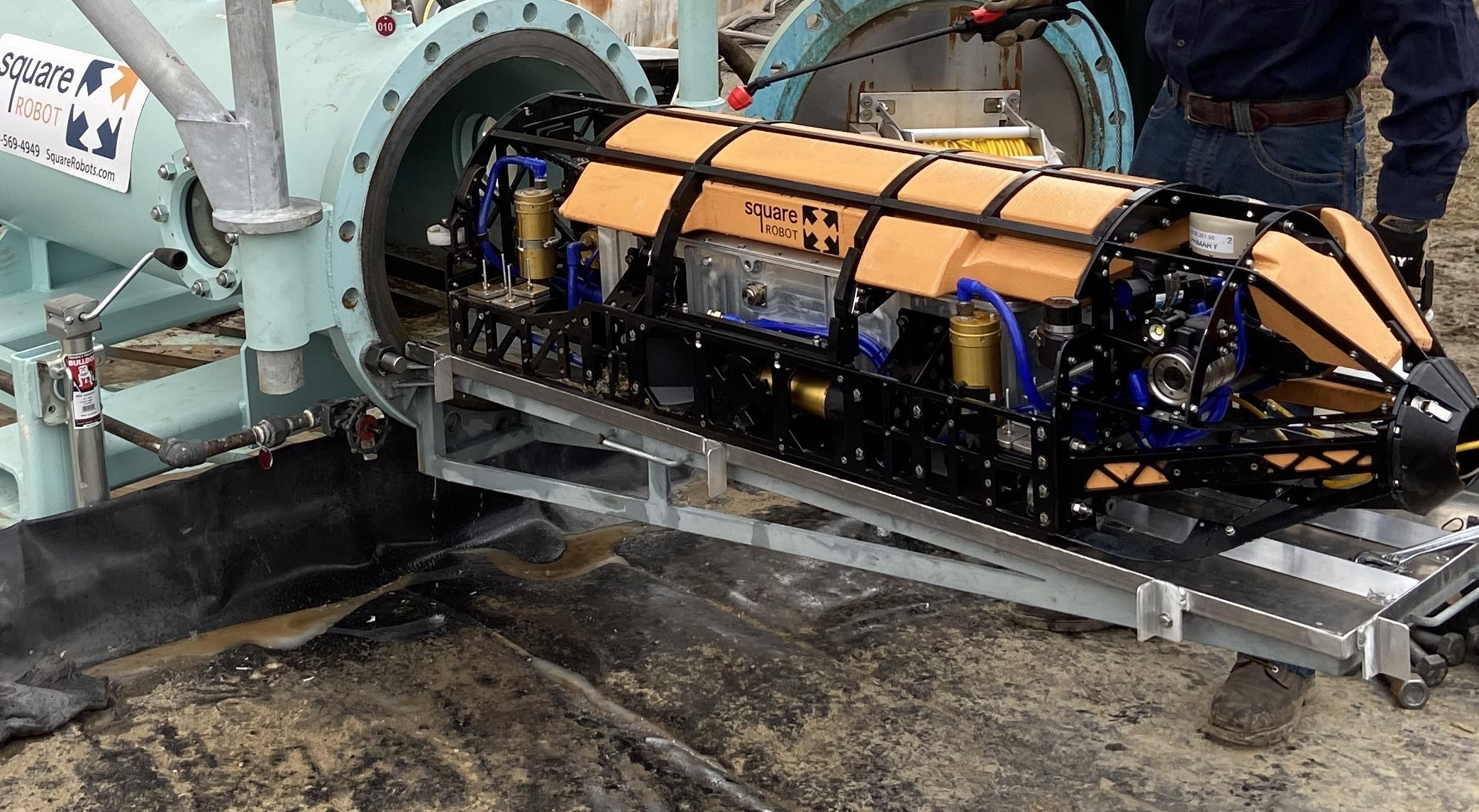
紧凑高效的运动控制为潜水机器人提供动力, 实现燃料储罐在役检测 >
Square Robot 成立于 2016 年,是地面储罐机器人检测领域的创新者,这 类储罐往往用于储存柴油、汽油、煤油等油类和其他产品。通过持续开发机 器人、数据采集和数据处理技术,Square Robot 在实现在役检测方面具有 独特优势,力求确保储罐的完整性和安全性。
加速人形机器人从概念到原型再到生产的 3 个技巧 >
预计在未来 10 到 15 年内,人形机器人将成为价值高达 60 多亿美元的一大商机1。许多实验室、研究机构和新创公司已经注意到这一点,正在争相开发概念和原型,以便在竞争中取得优势。 当然,该目标必须是设计和打造出一种可以随时制造并投放市场的机器人 — 即一种客户能接受的人形机器人。
使用重量轻、转矩密集、专为机器人量身定制的运动控制,打造出色的人形机器人 >
在很短的时间内,人形机器人就从科幻走向现实,并发展为市值 60 多亿美元的商机。 了解如何通过解决远远超出传统工业机器人要求的运动控制挑战,在这个呈指数级增长的市场中取得成功。
人形机器人:从设计到交付 >
人形机器人有望改善数百万人的生活和工作。 然而,要创造出一种设计,在执行任务时兼具人类的灵巧性和超越人类的耐久性,并成功将其推向市场,这意味着需要同时解决多个设计难题。 了解如何从原型机设计阶段开始,通过实施更智能的开发实践和机器人运动控制系统设计,将性能和可制造性融为一体。