为了尽可能地减少创伤,为仪器找到更合适的摄像机角度,机械臂应尽可能靠近彼此。 机器人手臂关节的轴长会对此产生限制。
科尔摩根专为机器人关节而设计的无框电机实现了高度紧凑的设计,同时通过使用标准电机和传动装置帮助缩短开发时间并控制成本。
请阅读我们的博客,了解如何最大限度地缩短机器人关节的轴长
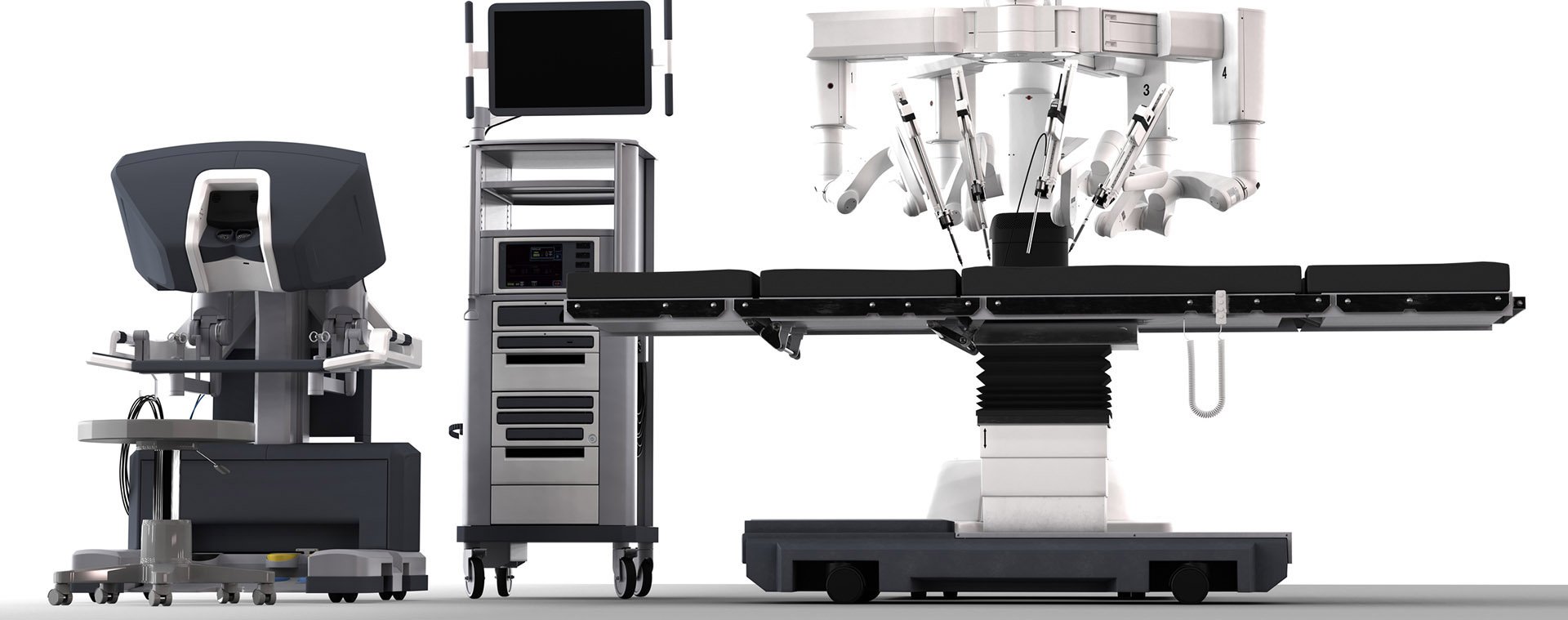
下一代外科手术机器人提供出色的人体工程学、可视性、触觉反馈和仪器控制效果,可协助外科医生进行微创手术,帮助患者尽快完全康复。
为了尽可能地减少创伤,为仪器找到更合适的摄像机角度,机械臂应尽可能靠近彼此。 机器人手臂关节的轴长会对此产生限制。
科尔摩根专为机器人关节而设计的无框电机实现了高度紧凑的设计,同时通过使用标准电机和传动装置帮助缩短开发时间并控制成本。
请阅读我们的博客,了解如何最大限度地缩短机器人关节的轴长


与大多数业务挑战不同,为全球医疗机构设计、制造和供应外科手术机器人是一项非常艰巨的挑战。 我们的端到端流程可帮助您为医生控制台、患者检查台以及重要的下一代多端口外科手术机器人集成高效的运动控制系统。
外科手术机器人专为执行微创手术而打造,必须可以在远小于人手可处理的区域中以绝对精度执行操作。 TBM2G 无框电机改进了先进技术,采用了紧凑封装,可提供高度精确、平稳的性能,即使在超低速度下也能准确完成典型的外科手术。
TBM2G 系列以高质量的自动化生产工艺为基础,并拥有科尔摩根获得高度认可的协同工程专业知识、可靠的全球供应能力和个性化支持服务。

通过利用我们广泛的电机、驱动器、控制器、齿轮和执行器产品组合,科尔摩根将助您优化每一个运动控制轴