当外科医生在手术机器人的帮助下进行可挽救生命的精细手术时,他们期望可以在极其狭窄的切口中在各种角度完全自由地操作基本器械,不受约束。
要满足这些关键的期望,就需要设计轴向紧凑并且独立又更紧密定位的机械臂关节。 如何在提供必要的转矩、速度和精度的同时实现这一目标? 阅读此白皮书,了解关键的设计考虑因素,包括齿轮箱和伺服电机的选择,以及如何解决机械臂关节中的严峻尺寸挑战。
当外科医生在手术机器人的帮助下进行可挽救生命的精细手术时,他们期望可以在极其狭窄的切口中在各种角度完全自由地操作基本器械,不受约束。
要满足这些关键的期望,就需要设计轴向紧凑并且独立又更紧密定位的机械臂关节。 如何在提供必要的转矩、速度和精度的同时实现这一目标? 阅读此白皮书,了解关键的设计考虑因素,包括齿轮箱和伺服电机的选择,以及如何解决机械臂关节中的严峻尺寸挑战。
to view this White Paper
to gain access to Kollmorgen content
想要实现所需的机械性能,按照驱动器制造商所规定的正确计量单位使用伺服电机参数十分重要。但是,如果不
能正确地理解电机与驱动器参数细节相关的规定术语、单位、命名法和参数之间的换算方式,那么很可能会使用
错误的单位,进而增加机器设计开发和制造过程的难度。
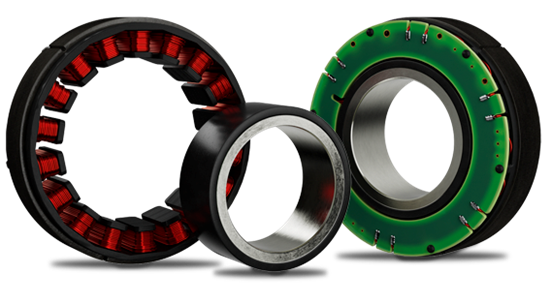
无框电机的应用并不局限于机器人关节。 紧凑型执行器、传感器系统万向支架、潜水推进系统和其他应用场景都能从直接驱动的高精度和紧凑型设计中受益。 了解如何将无框电机直接嵌入到机械装置之中。