提到无刷直流伺服电机时,大部分工程师可能会联想到一个箱体,带有连接安装螺栓的法兰、连接电源和数据线缆的接口,以及直接与负载耦合的转子轴。
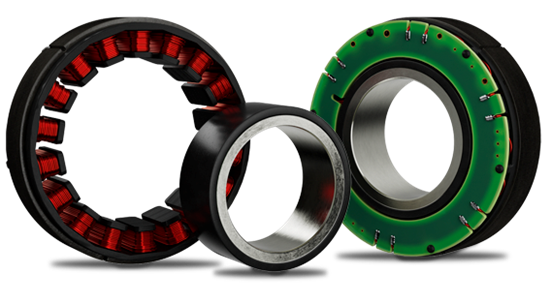
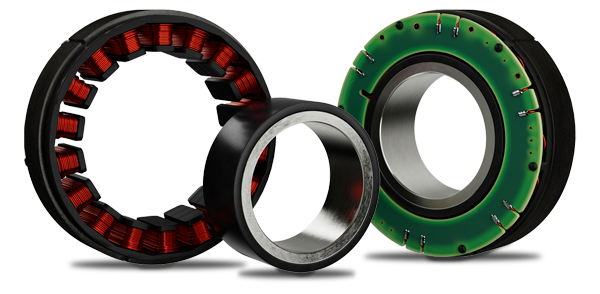
而在它的内部,则是包含一组带槽叠片,并且由铜线绕组进行填充的定子 定子中有一个带永磁体的转子,它与定子的电磁场相互作用,产生旋转运动。 永磁体转子被固定在一根轴上,轴的两端由轴承进行支撑,可使其自由旋转。 此外,反馈设备也可能会集成到设计中。
这是最常见的伺服电机设计,但如果您将除转子和定子之外的一切 — 外壳、轴、接口、轴承、集成反馈设备全部舍弃会怎样?
这就是无框伺服电机的基本设计,这种设计能够为某些类型的应用提供多种优势和机遇。 我们来看看为什么要选择无框电机,以及如何将其集成到您的机器中。
为什么要选择无框设计?
除了转子和定子之外,无框电机不含外壳、轴承或其他组件,可提供极为紧凑、转矩密度极高的运动控制性能。 电机可直接嵌入机器的结构设计,而非它自己的外壳。 它能够使用机器现有的轴和轴承,而不是自身的轴承。
因此,无框伺服电机是紧凑型高级部件的理想之选,例如旋转执行器,其设计目标是在紧凑的外形中实现高转矩和准确性。
直接嵌入机器中的无框电机还可免受苛刻环境的影响,例如高压冲洗或浸泡应用。 采用无框电机的机器更轻便、紧凑、精确,维护需求更低。
如何将无框电机集成到您的设计中
综上所述,相比连接有框电机以及耦合负载或齿轮组,无框电机嵌入的确需要更加关注设计细节。 以下介绍了重要的设计注意事项。
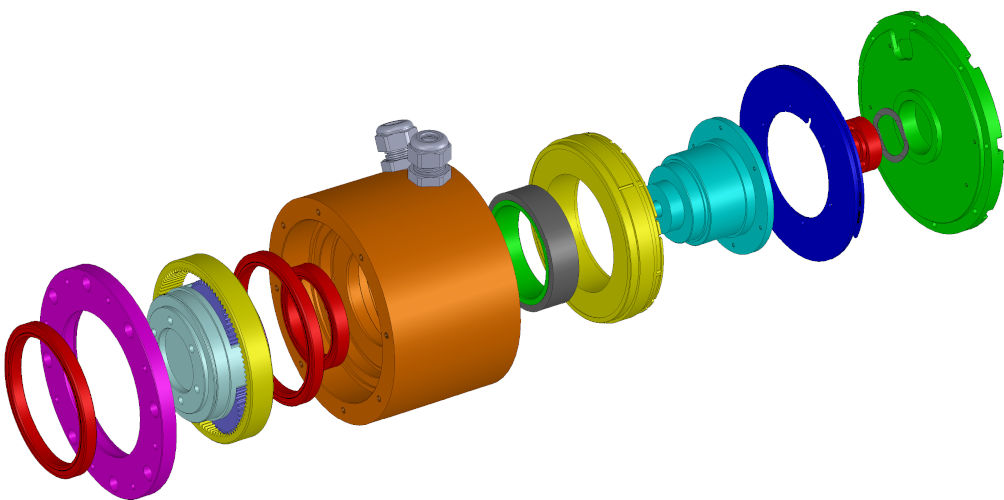
首先,确定您完成无框电机机器系统所需的组件:
- 齿轮传动 无框电机常用于直接驱动负载,无背隙、顺应性或运动控制损失。 如果需要齿轮系统来增加转矩,可选择紧凑型正齿轮、行星齿轮组、摆线齿轮组或谐波(应变波)齿轮组。 对于需要零背隙、紧凑外形、高减速比的应用来说,谐波减速机非常有吸引力。
- 反馈设备 在大多数情况下,您可能需要使用编码器(增量或绝对编码器,视应用而定)。 在极为恶劣的环境中,旋变编码器则是优先选择。 这些反馈设备可检测转子位置,实现闭环速度和位置控制。 编码器上的霍尔轨迹或电机内置的专用霍尔效应传感器,能为伺服驱动器提供所需的信息,用于正确转换提供给电机的功率。
- 制动器 为了提供保持转矩并确保发生断电或其他系统故障时的安全性(尤其是在垂直应用中),可能需要电磁或机械制动器。 制动器还可用于在电机关闭后,将负载“停止”在稳定位置。
- 轴承 无框电机会与机器轴自身的旋转轴直接耦合,由其自身轴承进行支撑。 您无需改变整体机器设计,但需要掌握轴和轴承的位置,并确认可在轴上添加转子的点位,然后根据该位置为定子设计外壳元件。
在此之后,您需要考虑其他机器设计元素:
- 外形尺寸 您的机器设计在电机直径或长度方面是否存在限制? 而力矩(轴向长度较短)和伺服(轴向长度较长)设计均可采用无框电机。 如果您的应用可容纳相对紧凑的轴向长度,那么力矩设计的较大直径使您能够利用 D2L 规则来充分提升转矩密度。
- 散热性能 由于无框定子被直接嵌入到机器中,因此需要确保支撑定子的外壳材料具有足够的散热性能。 通常情况下,定子附近的外壳厚度至少需要 4-6 毫米。 出于这一目的,铝是十分出色也是最常用的导热材料。 钢也是一种不错的材料,但部分不锈钢合金的散热效果可能略差一些,并且应进行适当的设计评审才能决定能否使用。
- 了解发热限制 根据电机与部件的契合方式,考虑机器系统中的发热效应。 例如,一台额定最高绕组温度为 155°C 的电机,会对旋转执行器中的润滑剂和电子组件产生怎样的影响?
即使具有有效的散热性能,电机电枢周围一两英寸范围内的温度可能也只会降低 15°C 到 20°C。 应确保热敏组件的位置足够远,或考虑采用能够在更低的最大绕组温度下提供所需转矩和速度的电机。 借助科尔摩根官网所提供的设计工具,设计工程师能够了解我们的无框电机在应用所需的发热限制下的性能表现。 - 考虑热传感器 热传感器可用于确认电机是否过热。 添加至伺服驱动器的 PTC(正温度系数)过热保护装置,可确保系统在必要时安全停止。 在原型机设计期间,您可能需要使用线性热敏电阻传感器,来测量电机在所需转矩/速度负载点下运行时的温度。 在先进控制系统中,传感器可用于监测电机是否运行过激,并帮助系统确定是否需要维护。
- 可制造性设计 在设计旋转执行器等运动控制系统时,一开始就要将最终结果考虑在内,包括设备制造以及全寿命维护涉及的所有步骤和费用。 需要记住的是,原型机制造和全规模制造并非完全相同。 您需要确保拥有所有组件的可靠来源,并且组装流程简单直接。
同时还需要注意存在于永磁体转子中的巨大磁力。 为您安全组装电机所需要的一切专业工具和装置做好计划。
为什么选择 TBM2G 无框伺服电机?
科尔摩根提供全系列无框架伺服电机,包括成熟的 TBM 和 KBM 系列以及创新的 TBM2G 系列 从 24 到 680 VDC 的母线电压,从高转矩到高速度的应用要求,从普通环境到恶劣极端条件 — 科尔摩根的无框伺服技术能为几乎任何一种应用提供解决方案。
TBM2G 是我们极具创新的新型电机系列,采用力矩(扁平)设计,可在紧凑的电磁封装中提供极高的转矩密度。 如果力矩电机外形适合您的应用要求,那么以下是选择 TBM2G 的主要原因:
- 热效率 与同类电机 155°C 的最高绕组温度相比,TBM2G 电机经过了特别优化,在低至 85°C 的绕组温度下可发挥强大性能(它在 155°C 的最高绕组温度下也能保持强大的持续性能)。
TBM2G 的低温升特性,使它十分适合用于狭小空间,避免轴承和齿轮润滑剂、反馈电子元件和其他热敏组件可能会因高温而发生损坏。 - 多种尺寸 TBM2G 电机经过特别优化,母线电压高达 48 VDC,并有七种框架尺寸直径可供选择 (50–115 mm),每一种直径都可搭配三种叠片长度(8、13、26 mm)以及三种绕组选择(A、C、D)。 标准配置多达 63 种,几乎可适应任何一种低压应用。
- 更强大的批量交付能力 科尔摩根能够以与竞争对手同等或更快的速度交付原型电机,同时保持出色的品质。 更重要的是,当您确定设计后,我们可快速扩大规模实现全速率生产,同时保持统一的质量水平,帮助您将机器快速推向市场,免去后顾之忧。
无框电机是您的未来之选吗?
无框电机简化了运动控制,但要将其融入优化的机械设计中,还需要许多活动部件。 我们随时准备好帮助您解决一切问题。 联系科尔摩根运动控制专家,让我们一起探讨无框技术在您应用中的潜力。